Each lost life in traffic is too much.
We should do our utmost to prevent fatal accidents. The project 5G-Safe-Plus was aiming to tackle this problem and reach the objective.
5G-Safe-Plus was a multinational Celtic-Next project with 13 partners from 4 different countries. The project involved 8 ITS Factory members: Sitowise, VTT, FMI, Infotripla (now Arctic Machine), Unikie, Teconer, Destia, and Vaisala. All had important roles to reaching the objectives of the project.
Digital twin in 5G-Safe-Plus
Sitowise was the coordinator of the 5G-Safe-Plus project, and they also produced the digital twin of the Sodankylä test track which was used to test the functionality of autonomous vehicles and the communication between vehicles.
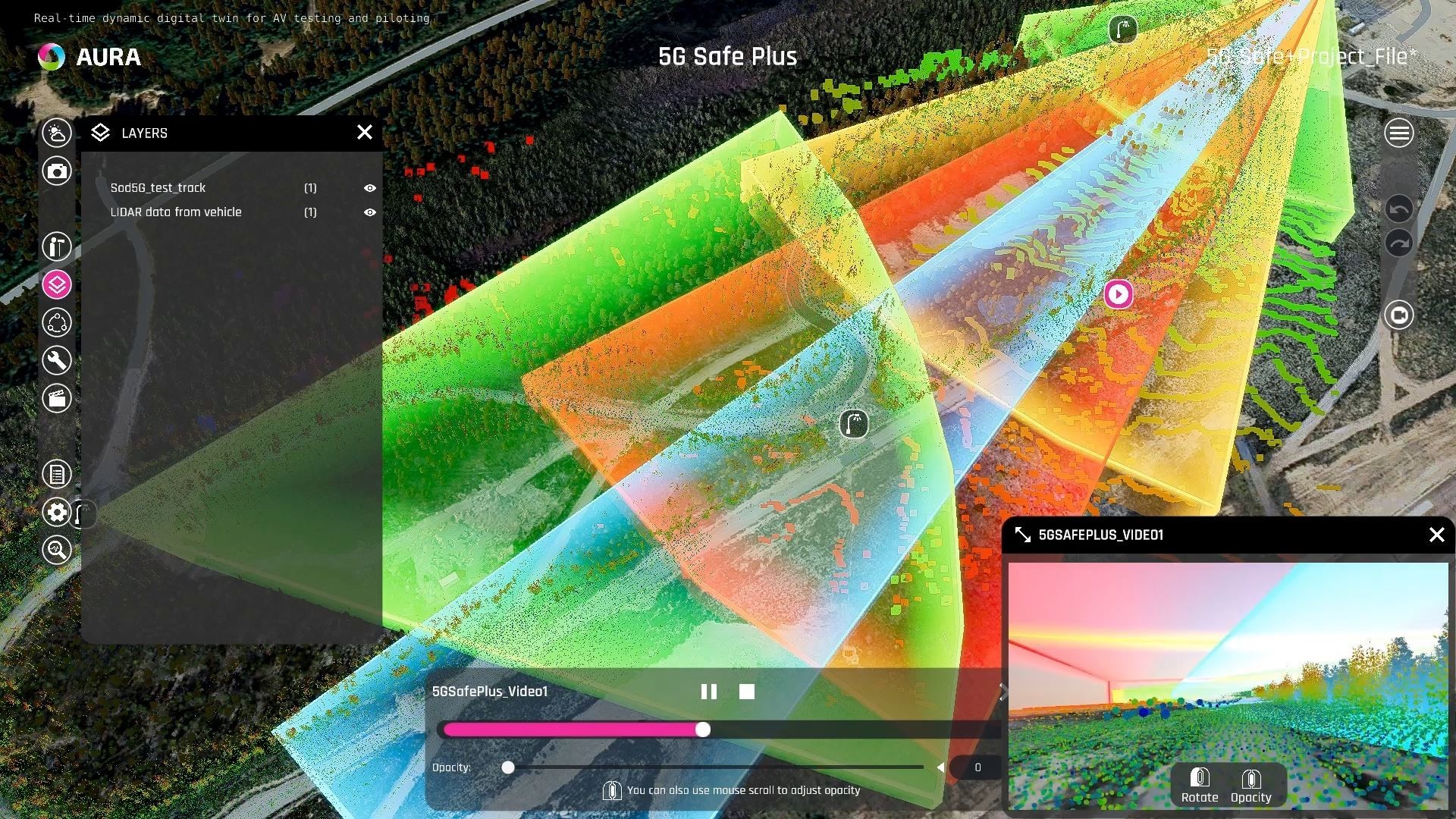
The picture showcases the reach of the 5G communication towers, shown in the digital twin.
What does the Sodankylä test track digital twin provide:
- The digital twin can be used to create a digital twin data counterpart of the physical test measurements and simulation results in the test track.
- The test measurements and simulation results were repeated in different weather conditions with different amount of snow and ice. The target has been to create a representative set of weather visualization condition data and 5G/802.11p network coverage for the Digital Twin replica.
- The set of test measurements & simulations and virtual counterparts have also been used to evaluate the performance of the digital twin by confirming the possibility of showing the recorded and simulated data.
- The digital twin accurately produces a virtual simulation environment that mirrors the reality of the Sodankylä test track environment and sensors. The digital twin offers several features:
- User configurable visual analysis of the 5G network coverage on the track based on local measurements
- Replication and simulation of the local geometry and vegetation in the test track area
- Virtual counterparts of the RWS1 and RWS2 road weather stations and their sensors
- IoT linking of weather data from a local weather station or through RWS link to the sensor installation on site
- Dynamic weather visuals are adjusted in the virtual environment based on real world weather data
- Show test vehicles in the digital twin based on Json output that is collated and served by FMI.
- Virtual camera sensors replicate the local environment field of view and camera installations on site in the RWS1 and RWS2 towers
- 360 video feed filmed during winter conditions allowing comparison between real world conditions versus the virtual scene conditions
- Virtual vehicle driving simulation on the test track conditions
- Placing and manipulating virtual objects and obstacles in the virtual sandbox environment
- Layer data may be published in the digital twin for comparison of different layer datasets
- Ability to visualize SLAM point cloud sets to provide additional visual and geometric scene context from LIDAR sensor data.
- Digital twin scene data geometry may be used as assisted data layers to HD map creation.
Want to learn more about the digital twin used in the project or in some other project?
Contact Pekka Eloranta (pekka.eloranta@sitowise.com) and/or Niklas Salminen (niklas.salminen@sitowise.com)
![]()
Shout out also to the international partners of the project: BEIA Consulting (Romania), Wedge Networks (Canada), METI (Canada), Hitec (Luxembourg), Post Luxembourg (Luxembourg).